Q100 - wir bauen einen Racer für die Halle
 Q
100 steht für einen Racer mit einem Motorabstand von 100 mm. Der Racer kostet
bei Banggood ca. 50 € und muss dafür aber selbst aufgebaut werden.
Q
100 steht für einen Racer mit einem Motorabstand von 100 mm. Der Racer kostet
bei Banggood ca. 50 € und muss dafür aber selbst aufgebaut werden.
Das hat natürlich zwei Vorteile.
Erstens lässt sich das Modell bei einem Schaden schnell wieder reparieren und zweitens lernen wir viel über die Racerphysik.
 Im
ersten Teil wollen wir noch keine Kamera einbauen, denn der Quadro soll auf
Sicht gesteuert werden.
Im
ersten Teil wollen wir noch keine Kamera einbauen, denn der Quadro soll auf
Sicht gesteuert werden.
Das Herz des Copters ist der Controller. Dieser steuert die vier Motoren so an, dass das Modell sicher gesteuert werden kann.
 Der Controller kann mit der Software Cleanflight eingestellt werden. Jeder,
der sich mit Multicoptern
wirklich
beschäftigt, sollte diese Software auf dem PC haben. Sie ist Freeware, d.h.
kostenlos. In einem ersten Schritt
muss unsere Neuerwerbung geflasht werden. Dabei verbinden wir den Controller
mit eine USB-Kabel.
Der Controller kann mit der Software Cleanflight eingestellt werden. Jeder,
der sich mit Multicoptern
wirklich
beschäftigt, sollte diese Software auf dem PC haben. Sie ist Freeware, d.h.
kostenlos. In einem ersten Schritt
muss unsere Neuerwerbung geflasht werden. Dabei verbinden wir den Controller
mit eine USB-Kabel.
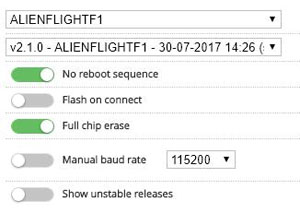 Dann
rufen wir in Cleanflight den Firmware Flasher auf und nehmen folgende
Eintragungen vor. ( Natürlich den neusten Stand ! )
Dann
rufen wir in Cleanflight den Firmware Flasher auf und nehmen folgende
Eintragungen vor. ( Natürlich den neusten Stand ! )
Nun wird die Software hochgeladen, wobei der Controller noch nicht eingesteckt ist.
Auf dem Controller befindet sich ein Boot-Button. Diesen drücken wir, wenn der USB-Stecker mit dem PC verbunden wird.
Es sollte eine blaue LED leuchten.
Jetzt
können wir den Controller mit der neuen Firmware flashen. Es ist ein Balken zu beobachten und das Ende des
Vorgangs wird angezeigt. Nun sollte sich die Verbindung herstellen lassen. Wenn man den Controller bewegt,
kann man das am Bildschirm durch die entsprechende Bewegung des dort
abgebildeten Quadros beobachten .
 Die
weiteren Einstellungen nehmen wir später vor.
Die
weiteren Einstellungen nehmen wir später vor.
Nun schließe wir den Empfänger an. Wir nutzen einen DSMX-kompatiblem Empfänger, der sich an eine Spektrum Funke binden lässt. Dieser übergibt die empfangenen Daten im S-Bus-Betrieb an den Controller.
Der Vorteil diese Empfängers, er hat einen Binde-Button, was das Binden sehr erleichtert.
 Den
Binde-Button drücken, Spannung an den Empfänger und dann den Sender in den
Bindemodus bringen, damit sollte der Empfang hergestellt sein.
Den
Binde-Button drücken, Spannung an den Empfänger und dann den Sender in den
Bindemodus bringen, damit sollte der Empfang hergestellt sein.
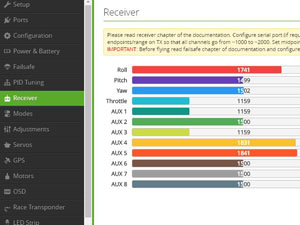
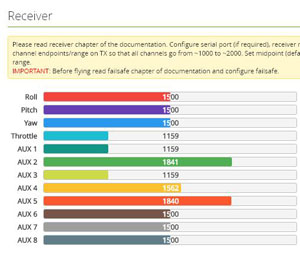
Verbindet man jetzt die Einheit Controller/Empfänger mit dem PC, so kann man die Funktionsfähigkeit überprüfen. Geht mal auf Receiver, dann seht ihr die Knüppelausschläge und die Wirkung auf das Modell am Monitor.
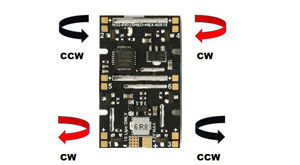 Wenn
alles funktioniert, können wir die Motoren anschließen. Es handelt sich um
8,5x20 mm Typen, zwei CW und zwei CCW.
Wenn
alles funktioniert, können wir die Motoren anschließen. Es handelt sich um
8,5x20 mm Typen, zwei CW und zwei CCW.
Motoren mit CCW Drehrichtung haben weiss(+)/schwarze(-) Kabel.
 Die CW Motoren sind
rot(+)/blau(-) kodiert.
Die CW Motoren sind
rot(+)/blau(-) kodiert.
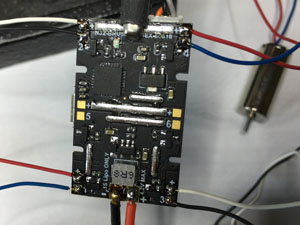
Bitte erst die Kontakte gut verzinnen und danach die Motoren anlöten. Der Lötkolben sollten eine 0,5 mm Spitze haben, da die Lötflächen schon ziemlich winzig sind.
Bei diesem Arbeitsgang löten wir dann auch gleich die Stromversorgung an. Die vier Motoren sind stark magnetisch und kleben zusammen. Ist aber kein Problem.
 Nun kann man auch schon die Motoren und den Controller montieren. Der
Controller besitzt im Frame eine spezielle Aufnahme, die Motoren werden
einfach in die Aufnahme gedrückt.
Nun kann man auch schon die Motoren und den Controller montieren. Der
Controller besitzt im Frame eine spezielle Aufnahme, die Motoren werden
einfach in die Aufnahme gedrückt.
Bevor wir die Propeller montieren werden die Protektoren aufgedrückt.
Auch die Propeller klemmen nur auf der Achse. Bei der Demontage braucht man einen kleinen Schraubenzieher als Hebel. Und sehr oft sollte man das ohnehin nicht tun, ansonsten verliert man die Props beim Flug.
Nun kommt die spannende Arbeit, wir stellen den Controller ein.
Also USB-Kabel ran.
Zuerst stellen wir die PID-Werte ein. Dies ist ein Programm im Controller, welches die Sensordaten auswertet und die Motoren entsprechend über Motorregler ansteuert. PID steht für: Proportional–Integral–Derivative.
| Regler | Beschreibung | Wirkung |
|---|---|---|
| P-Regler | Wirkt proportional zum Sensorsignal | In der Gegenwart. |
| I-Regler | Verändert fortlaufend die Leistung, je nach Abweichung und der verbrauchten Zeit. | Bezieht die Störungen aus der Vergangenheit mit ein |
| D-Regler | Wird nur bei schnellen Änderungen aktiv | Wirkt in die Zukunft und versucht bei schnellen Änderungen vorausschauend zu reagieren |
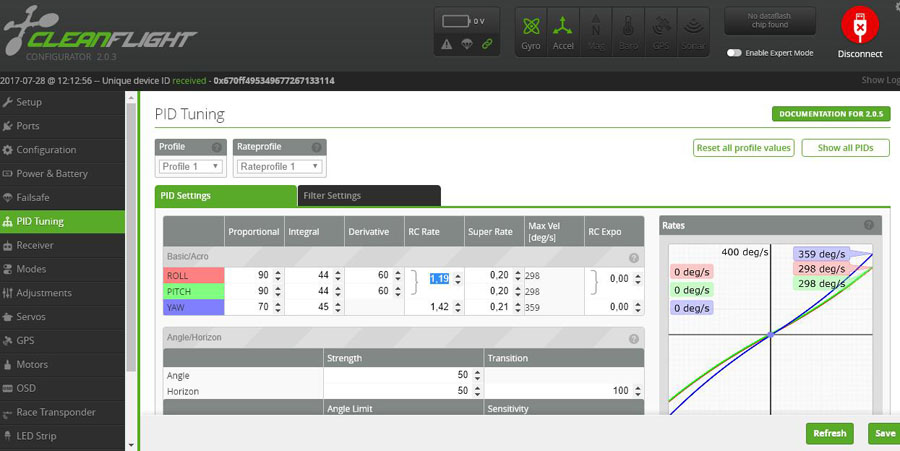
Ich habe hier unsere Startwerte eingegeben. Zusätzlich lassen sich die Drehraten und die maximalen Winkel einstellen. Vielleicht sind 50° für den Beginn etwas viel, 30° reichen auch.
Nun muss man den Empfänger einstellen. Zuerst melden wir einen Spektrum Empfänger an. Danach stellen wir die Mitten genau auf 1500. Ist das richtig, dann bewegt sich die Animation nicht mehr. Man kann mit Hilfe der Animation auch gleich die Steuerrichtung der Knüppel verfolgen und ggf. umkehren.
 |
 |
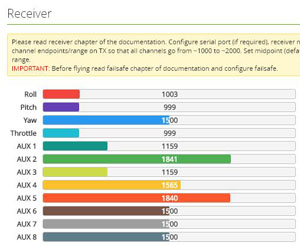 |
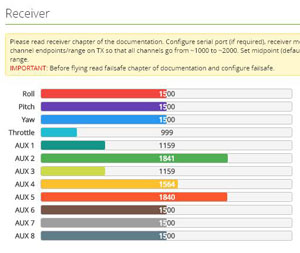
Dann wird der Steuerbereich einprogrammiert. Dazu modifiziert man den Stellweg im Sender so, dass Werte zwischen 1000 und 2000 erreicht werden.
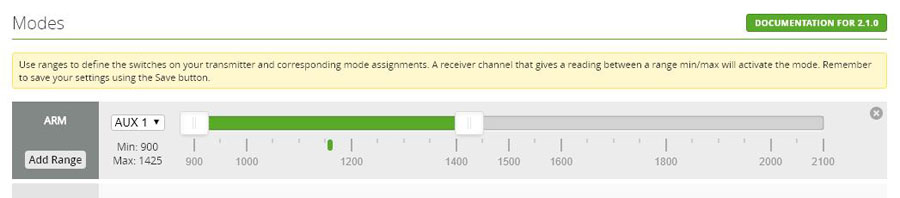
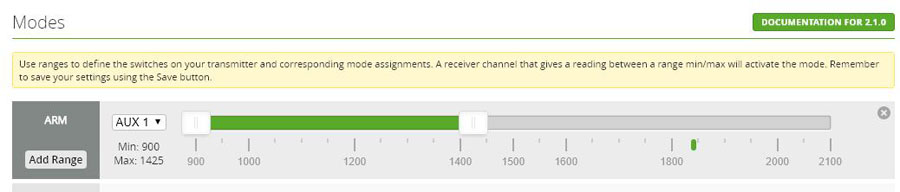
Nun die Programmierung der Scharfschaltung - armieren.
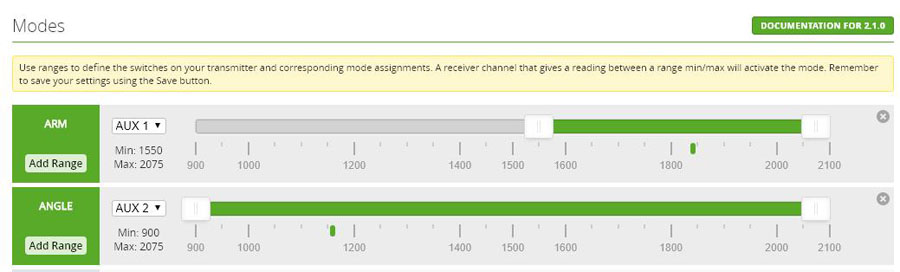
Dazu gehen wir in MODES. Wir legen einen Schalter auf Kanal 5 und richten den Kanal ein. Man zieht die Balken so, dass armed und disarmed eindeutig gekennzeichnet sind.
Im Controller sind unterschiedliche Modi hinterlegt. Ein Einsteiger ist mit dem stabilisierten Mode, dem s.g. Angle Mode am besten bedient. Dazu legen wir einen Schalter auf den Kanal 6 und Programmieren aber den ganzen Bereich. So kann man z.Z. den Angle Mode nicht verlassen.
Damit sind alle wichtigen Einstellungen getätigt und wir können den ersten Flugversuch machen.
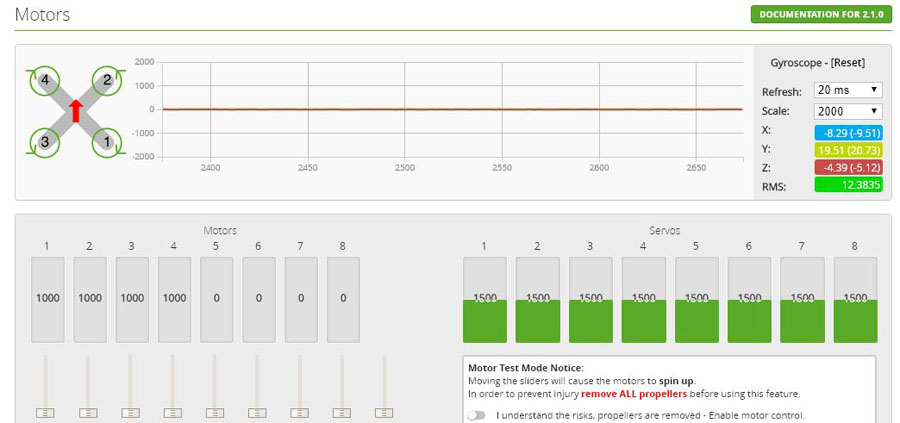
Wer will, kann die Funktion der Motoren am PC testen, aber bitte ohne Luftschraube.
Nun kann der erste Flugversuch beginnen. Viel Spaß !